Quaternions
In mathematics, the quaternions are a number system that extends the complex numbers. They were first described by Irish mathematician William Rowan Hamilton in the mid of the XIXth century. He defined them as quotients of two directed lines or vectors in a three-dimensional space. What is special about them is that multiplication of two quaternions is non-commutative (changing the order of operands changes the result). This feature makes them a powerful tool for 3D engines.
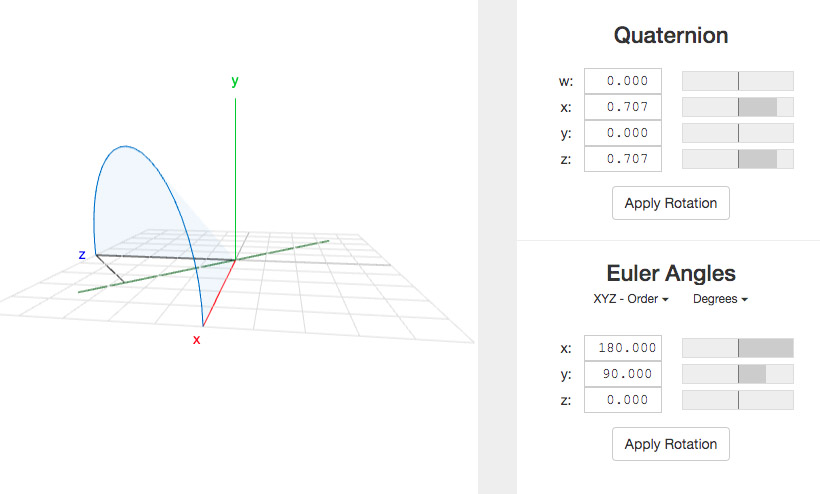
A capture from: quaternions.online
The ViewAR API uses Quaternions to describe the model instance's orientation.